
🤖 NASA SWIM Robots Development
Lab: Dr. Azadeh Ansari’s Lab at Georgia Tech
NASA Sensing With Independent Micro-Swimmers (SWIM) projects aims to build miniature robots for space exploration, specifically focusing on missions that help find habitable planets. These robots will be designed to have swarm intelligence. For more informaton about the project: “Swarm of Tiny Swimming Robots Could Look for Life on Distant Worlds”
Temperature and Pressure Sensor:
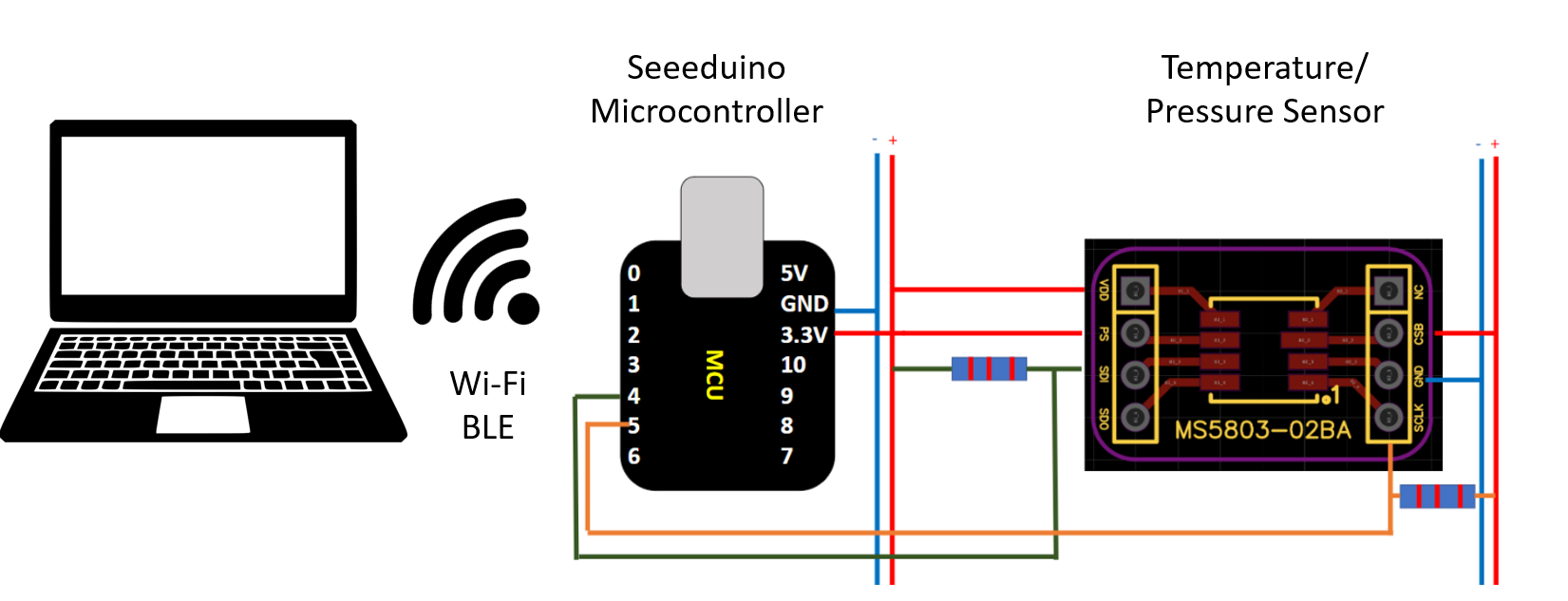 Schemetics for temperature and pressure sensor sending data wirelessly. Seeeduino (the smallest Arduino) is used for sensor testing and data transmission.
Schemetics for temperature and pressure sensor sending data wirelessly. Seeeduino (the smallest Arduino) is used for sensor testing and data transmission.
Salinity Sensor:
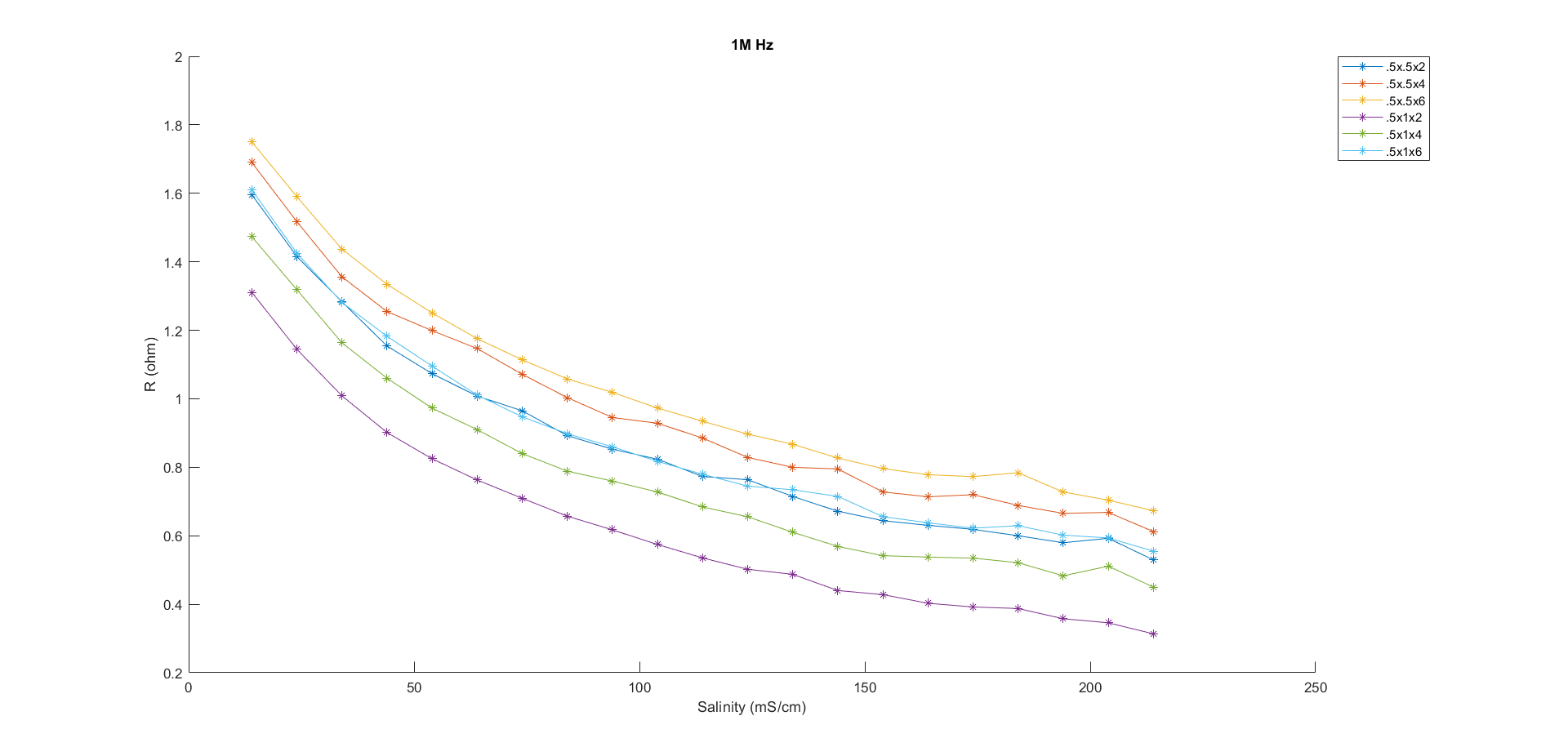 Salinity sensor testing results at frequency 10K, 100k, and 1M Hz. Testing is done by performing impedance sweep on 6 different MEMS salinity sensors. The figure above shows one of the result of 1M Hz group
Salinity sensor testing results at frequency 10K, 100k, and 1M Hz. Testing is done by performing impedance sweep on 6 different MEMS salinity sensors. The figure above shows one of the result of 1M Hz group
Processing.js Simulation of robots’ swarm behavior:
Simulation of SWIM robot’s swarm behavior under water.
Video:
3D six Degree-of-freedom Physics in Processing (java)